

ฟิสิกส์รอบตัว ตอน จักรยาน
จักรยาน

จักรยาน (Bicycle) คือ การขนส่งโดยใช้พลังงานที่ได้จากมนุษย์ ขับเคลื่อนโดยการกดลูกบันได มีสองล้อเชื่อมต่ออยู่กับเฟรม ล้อทั้งคู่เรียงกันในทิศทางเดียวกัน ประหยัดพลังงานแก๊สและน้ำมันในการใช้ยานพาหนะในการเดินทาง โดยคนที่ขับขี่จักรยานเรียกว่านักปั่นจักรยาน
รถจักรยานรุ่นใหม่ คือ รุ่นที่ใช้โซ่ส่งถ่ายกำลัง (chain driven bicycle) มีมาได้ประมาณ 129 ปีแล้ว ในประเทศแถบยุโรป เช่นประเทศเนเธอร์แลนด์ เดนมาร์ก เยอรมนี และสวีเดน เป็นอาทิ ใช้กันอยู่ทั่วไปในชีวิตประจำวัน ไม่ว่าจะไปทำงาน หรือไปเรียนหนังสือ ฯลฯ ในประเทศไทยของเราก็มีคนนิยมขี่จักรยานกันมากขึ้นในปัจจุบัน ด้วยเหตุผลประกอบกันหลายประการ เช่น เป็นยานพาหนะที่มีประสิทธิภาพที่สุด กล่าวคือสามารถเปลี่ยนพลังงานของคนขี่ให้เป็นพลังงานจลน์ของทั้งรถจักรยานและคนขี่ได้ถึงประมาณ 90 % มากกว่ารถยนต์ (เปลี่ยนพลังงานในน้ำมันเชื้อเพลิงให้เป็นพลังงานจลน์ของรถ) ถึง 25 เท่า การขี่รถจักรยานไม่ก่อให้เกิดมลพิษใดๆ ราคาไม่แพง ได้ออกกำลังกายไปด้วย เป็นการนันทนาการที่ดีของครอบครัวหรือหมู่
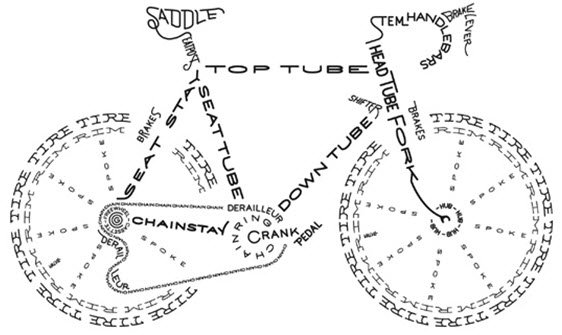
จักรยานจะประกอบด้วยตัวถังจักรยาน(เฟลม), อาน(เบาะนั่ง), แฮน, ล้อจักรยาน, ชุดเบรคจักรยาน, ชุดจานปั่นและโซ่จักรยานประกอบกันรวมเป็นจักรยาน1คัน ขับเคลื่อนที่ออกแรงถีบกลไกให้ล้อหมุน
การออกแบบจักรยานมีผลกระทบอย่างมากต่อสังคม ทั้งในด้านของวัฒนธรรม และความก้าวหน้าของอุตสาหกรรม ส่วนประกอบหลาย ๆ อย่างเป็นแรงผลักดันที่เกิดจากการพัฒนาของรถยนต์และนำมาใช้กับจักรยานรวมถึง ลูกปืน ยางที่ใช้ลม โซ่ขับเคลื่อน เฟืองเกียร์ และ ซี่ลวด
ปัจจุบันจักรยานมีหลายชนิด มีตั้งแต่ 1 ล้อ(จักรยานล้อเดียว) ไปจนถึงจักรยานหลายล้อ ยังมีประเภทดัดแปลงแบบแปลกๆ เช่นมีล้อหน้าใหญ่ แต่ล้อหลังเล็ก จักรยานยังใช้เป็นเครื่องมือในการแข่งขันกีฬาอีกประเภทหนึ่ง
จัดแบ่งประเภทของจักรยาน
1. จักรยานประเภทใช้งานทั่วไป เป็นจักรยานโดยทั่วไปใช้งานในชีวิตประจำวัน หรือที่เรียกกันว่าจักรยานจ่ายตลาด, จักรยานแม่บ้าน, จักรยานเด็ก เป็นต้น โดยจักรยานจะประกอบสำเร็จรูปพร้อมใช้งานได้ติดตั้งอุปกรณ์ต่างๆครบถ้วน มีราคาถูก ราคาจักรยานเริ่มต้นที่หนึ่งพันบาทหาซื้อได้ง่ายที่ร้านขายจักรยานทั่วไป

2. จักรยานประเภทใช้แข่งการกีฬา เป็นจักรยานในลักษณะเสือหมอบ ตัวจักรยานมีการติดตั้งเกียร์จักรยานเสริมเข้าไปมีตั้งแต่ 5เกียร์ ถึง 14เกียร์ เฟลมตัวถังจักรยานแข็งแรงมีน้ำหนักเบา ออกแบบให้เพียวลม ยางรถจักรยานมีลักษณะผอมบางแต่ทนแรงกดดันได้สูง ราคาจักรยานที่ใช้แข่งเริ่มต้นที่หลักหมื่นปลาย

3. จักรยานประเภทใช้ออกกำลัง สปอร์ต ท่องเที่ยว เป็นจักรยานที่ผสมผสานระหว่างจักรยานที่ใช้งานทั่วไปรวมเข้ากับจักรยานที่ใช้แข่งขัน ออกมาในรูปแบบจักรยานไฮบริด Hybrid ออกแบบลักษณะการใช้งานที่ลุยได้ทุกพื้นที่ ใช้งานในเมือง ใช้งานในป่า ขึ้นเขาก็ได้ ราคาจักรยานไฮบริดเริ่มต้นแบบถูกๆที่หลักพันปลายๆ

ปัจจุบันความนิยมของจักรยานได้ถูกจัดแบ่งออกเป็น 2 ประเภทใหญ่ๆ
1. จักรยานประเภทถนน
2. จักรยานประเภทวิบาก

การหัดขี่จักรยานทำได้ไม่ยาก และเมื่อขี่เป็นแล้วก็ไม่ต้องคอยจดจ่ออยู่กับการควบคุม สามารถขี่ไปโดยไม่ล้ม นี่เป็นผลจากการออกแบบที่รู้จักนำหลักการทางฟิสิกส์มาใช้
ทำไมจักรยานจึงไม่ล้มไปทางซ้ายหรือขวา เคยเล่นเลี้ยงท่อนไม้ให้ตั้งบนมือหรือไม่ ถ้าท่อนไม้เอนไปข้างหน้า มือจะเคลื่อนไปข้างหน้าทันที ถ้าท่อนไม้เอียงไปทางขวา มือจะเคลื่อนไปทางขวา เพื่อรักษาศูนย์ถ่วงของไม้ให้อยู่บนจุดหมุน
ขณะขี่จักรยาน ผู้ขี่สามารถรักษาสมดุลไว้ได้ ( โดยเฉพาะกรณีที่ขี่ช้า ) ด้วยเหตุผลเดียวกับการเล่นเลี้ยงท่อนไม้ เมื่อจักรยานเอียงไปทางซ้าย ศูนย์ถ่วงของผู้ขี่จักรยานและรถจะเคลื่อนไปทางซ้าย หากขยับแฮนด์รถบิดไปทางซ้ายให้พอเหมาะจุดสัมผัสพื้นของล้อหน้าจะเคลื่อนไปทางซ้ายเช่นกัน ทำให้รักษาศูนย์ถ่วงใหม่ไว้ได้
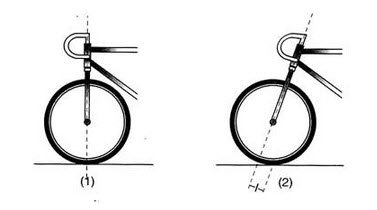
เมื่อขี่จักรยานจนชำนาญแล้ว ผู้ขี่ไม่จำเป็นต้องใจจดใจจ่อคอยขยับแฮนด์รถตลอดเวลา เพราะเส้นแนวแกนของแฮนด์รถไม่ได้ผ่านจุดสัมผัสพื้นของล้อหน้า แต่อยู่ที่แนวดิ่งที่มีระยะห่าง l จากจุดสัมผัสพื้น ตามที่แสดงไว้ในรูป (2) ซึ่งก็คือแขนของแรงที่แรงเสียดทานที่พื้นมีต่อแนวแกนเมื่อจักรยานเอียงไปทางซ้าย แรงเสียดทาน f ที่พื้นจะเกิดโมเมนต์ของแรง (f´l) กระทำต่อล้อหน้า และโมเมนต์ของแรงนี้จะทำให้ล้อหน้าบิดไปทางซ้ายพอดี ดังนั้นเราจึงสามารถอาศัยแขนของแรงนี้รักษาสมดุลของรถจักรยาน แม้ว่าเราจะปล่อยมือได้ แต่โครงสร้างของจักรยานในรูป (1) นั้นจะไม่สามารถขยับแฮนด์รถเพื่อรักษาสมดุลได้ จำเป็นต้องเอียงตัวไปมาจึงจะรักษาสมดุลไว้ได้
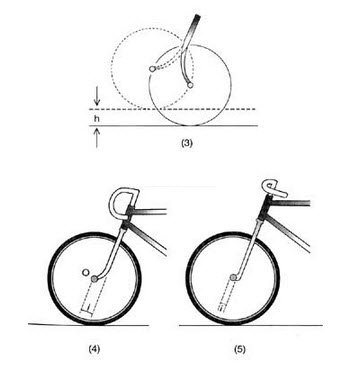
นอกจากนี้ตะเกียบของล้อหน้าที่โค้งงอจะทำให้แกนล้อOมีระยะห่างiกับแกนของแฮนด์รถดังที่แสดงไว้ในรูป(4)เมื่อเป็นเช่นนี้ในเวลาที่ขยับแฮนด์รถ ล้อหน้าจะต่ำลง ดังแสดงในรูป(3)แต่เนื่องจากพื้นดินไม่สามารถเลื่อนต่ำลงได้ จึงทำให้รถและผู้ขี่ถูกยกสูงขึ้น(ยกขึ้นสูงสุดเท่ากับh )เมื่อปล่อยมือจากแฮนด์รถ น้ำหนักของรถและผู้ขี่จะกดทับให้ล้อหน้าเคลื่อนไปเป็นแนวตรง กล่าวคือ ถึงแม้จะปล่อยมือจากแฮนด์รถ แต่แฮนด์รถยังสามารถรักษาตำแหน่งที่ทำให้รถเคลื่อนที่ไปเเป็นแนวตรงได้โดยอัตโนมัติ แม้จะทับถูกกรวดบนพื้นถนนแฮนด์รถก็ยังหันตรงได้เอง โครงสร้างในรูป(5)นั้นระยะiน้อยมาก จักรยานแบบนี้จะรักษาสมดุลได้ไม่ดี แต่จะมีความคล่องตัวมากกว่า เมื่อมีอีกคนหนึ่งมานั่งบนคานด้านหน้าจะทำให้จักรยานมั่นคงขึ้นก็มาจากเหตุผลเดียวกัน
การเคลื่อนที่ของรถจักรยาน
ในรถจักรยานมีเรื่องราวทางฟิสิกส์หลายเรื่อง อย่างการเคลื่อนที่ของรถจักรยานก็สามารถเข้าใจได้ไม่ยากโดยใช้กฎของเซอร์ ไอแซค นิวตัน รถจักรยานเคลื่อนที่ได้เพราะล้อหลังถูกทำให้หมุน โดยการที่คนขี่ออกแรงถีบที่บันได (pedal) F ซึ่งทำให้เกิดทอร์ค (torque) ขึ้น จานหน้า (chain wheel หรือ chainring) หมุนด้วยความเร็วเชิงมุม (angular velocity) ω0 แต่จานหน้ากับเฟืองหลัง (rear sprocket) ที่เชื่อมโยงกันโดยโซ่ (chain) เป็นเหมือนกับระบบรอก (pulley system) นั่นเอง
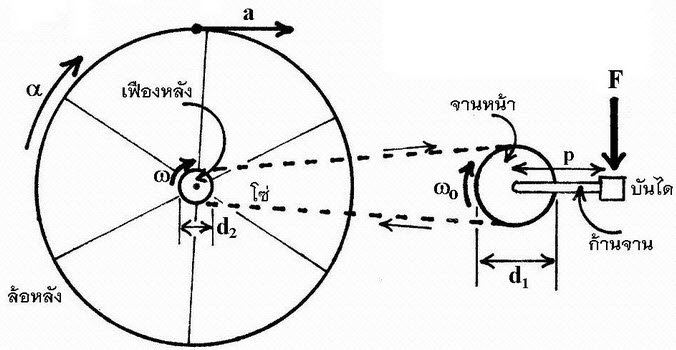
ทอร์คที่ถูกสร้างขึ้นที่จานหน้าจึงสามารถถ่ายทอดไปที่ล้อหลังได้ ทำให้ล้อหลังหมุนด้วยความเร็วเชิงมุม ω และความเร่งเชิงมุม (angular acceleration) α ซึ่งจะส่งผลให้รถจักรยานมีความเร่งเชิงเส้น (linear acceleration) a เป็นไปตามสมการ ต่อไปนี้
a = FpR
IG
จากสมการนี้จะเห็นได้อย่างชัดเจนว่าความเร่งของรถจักรยาน a จะแปรผันโดยตรงกับแรงถีบ F ของคนขี่ ยิ่งออกแรงถีบมากก็ยิ่งมีความเร่งมาก ดังจะเห็นได้จากการที่นักปั่นบางคนที่ตอนกำลังออกตัวหรือตอนกำลังจะเข้าเส้นชัยจะลุกจากอานขย่มทั้งตัว เพื่อจะออกแรงถีบให้ได้มากๆ และยังแปรผันโดยตรงกับความยาวของก้านจาน (crank arm) p ซึ่งโดยทั่วไปก็จะมีความยาวจำกัดที่ประมาณ 16 – 17.75 เซนติเมตร เพราะต้องสอดรับกับความยาวช่วงขาของคนขี่ สามารถนั่งถีบบนอานได้สบายๆ และสุดท้ายแปรผันโดยตรงกับรัศมีของวงล้อรถ R ดังจะเห็นได้ว่ารถจักรยานสำหรับใช้แข่งจะมีล้อที่ใหญ่คือมีเส้นผ่าศูนย์กลาง 29 นิ้ว ในขณะที่จักรยานเมาเท่นไบค์ จะมีล้อเล็กกว่าคือโดยทั่วไปมีเส้นผ่าศูนย์กลาง 26 นิ้ว (เพราะให้ความสำคัญกับความคล่องตัวมากกว่า)
นอกจากนั้นจะแปรผันอย่างผกผันกับโมเมนต์ความเฉื่อย (moment of inertia) I ของล้อรถจักรยาน ซึ่งจะประมาณว่าเท่ากันระหว่างล้อหน้ากับล้อหลัง จะเห็นได้ว่าล้อของรถแข่งทางเรียบจะมีรูปร่างผอมสะโอดสะองกว่าล้อรถจักรยานทั่วๆไป และจะทำด้วยวัสดุที่มีน้ำหนักเบา อย่างเช่นคาร์บอนไฟเบอร์ (carbon fiber) ทั้งนี้ก็เพราะต้องการลดค่า I ลงให้ได้มากที่สุด นอกเหนือจากเรื่องลดแรงเสียดทานระหว่างล้อกับผิวถนนและลดการต้านของอากาศ ทั้งนี้เพราะค่า I ของวัตถุใดจะขึ้นกับมวลของวัตถุนั้นด้วย และยังแปรผันอย่างผกผันกับค่า gear ratio (G) ซึ่งก็คืออัตราส่วน d1/d2 โดย d1 และ d2 คือเส้นผ่าศูนย์กลางของจานหน้าและเฟืองหลัง ตามลำดับ ยิ่ง gear ratio มีค่าน้อย คือ d1 ลดลง หรือ d2 เพิ่มขึ้น หรือเกิดทั้ง 2 กรณีพร้อมกัน อัตราเร่งยิ่งมีค่าสูง ค่า gear ratio อาจจะคิดจากอัตราส่วนของจำนวนซี่ของฟันบนจานหน้า ต่อ จำนวนซี่ของฟันบนเฟืองหลังก็ได้เหมือนกัน เพราะขนาดของฟันเท่ากันหมด และขนาดเส้นรอบวงของวงกลมใดๆเท่ากับ (เส้นผ่าศูนย์กลาง X π) เฟืองที่มีเส้นรอบวงยาวกว่าก็จะมีจำนวนฟันได้มากกว่า เป็นสัดส่วนตรงไปตรงมา

ถ้าดูตามข้อเท็จจริงทางวิชาการที่เพิ่งกล่าวมานี้ รถจักรยานที่ใช้กันอยู่ทั่วไปก็น่าจะทำให้มีค่า gear ratio น้อยๆเข้าไว้ แต่ทำไมในทางปฏิบัติจึงไม่เป็นเช่นนั้น
ทั้งนี้ก็เพราะมีข้อเท็จจริงอีกประการตาม สมการ ที่ต้องคำนึงถึง กล่าวคือ
v = RGω0
ในที่นี้ v คือความเร็ว (เชิงเส้น) ของรถจักรยาน (มีหน่วยเป็นเมตร / วินาที) โดยจะมีค่ามากหรือน้อยนั้นจะขึ้นตรงกับรัศมีของล้อรถ (R) ขึ้นตรงกับค่า gear ratio (G) ซึ่งจะเห็นได้ว่าเป็นอะไรที่ตรงข้ามกับเรื่องความเร่งเชิงเส้นของรถจักรยาน (สมการที่ 1) และกับความเร็วเชิงมุมของจานหน้า (ω0) ซึ่งมีหน่วยเป็นเรเดียน / วินาที หรืออาจคิดเป็นรอบ / วินาทีก็ได้ เพราะ 2π เรเดียน เท่ากับการหมุนครบหนึ่งรอบนั่นเอง แต่รอบหมุนของจานหน้าสัมพันธ์โดยตรงกับ “รอบขา (cadence)” ของคนขี่ ดังนั้นสำหรับนักปั่นคนหนึ่ง ถ้าต้องการทำความเร็วที่ต้องการ ที่ใช้รอบขากำลังสบายๆสำหรับตัวเอง ก็ต้องรู้จักปรับใช้ค่า gear ratio ที่เหมาะสมกับตัวเองและสภาพถนน
โดยการคำนึงถึงทั้งประสิทธิภาพและความสบายในการขี่ รถจักรยานจึงต้องสามารถปรับค่า gear ratio ได้
คำตอบของเงื่อนไขนี้ก็คือการใช้เกียร์ (gear) ช่วย นักปั่นจักรยานอาชีพจะฝีกซ้อมไม่แต่เพียงเรื่องความแข็งแรงของกล้ามเนื้อเท่านั้น แต่จะต้องฝึกซ้อมการปรับใช้เกียร์ให้เหมาะสมกับสภาพภูมิประเทศด้วย เพื่อให้รอบขามีอัตราที่เหมาะสมที่สุดสำหรับตัวเอง โดยเฉลี่ยแล้วนักปั่นทางไกลจะใช้รอบขาในช่วง 80 – 120 รอบ / นาที (แลนซ์ อาร์มสตรอง ใช้รอบขา 120 รอบ / นาที)
ถ้านักปั่นคนหนึ่งที่ใช้รถจักรยานที่มีระบบเกียร์ที่ประกอบด้วยชุดจานหน้า 3 จาน และชุดเฟืองหลัง 8 เฟือง [2] กำลังขี่อยู่บนทางราบ ด้วยความเร็วตามที่ต้องการและมีรอบขาค่าหนึ่งที่กำลังสบายสำหรับเขา สมมุติ (แบบสุดขั้วเพื่อให้เห็นตัวเลขได้ชัดเจน) ว่าขณะนั้นเขาใช้เกียร์ 3/8 คือใช้จานหน้าอันใหญ่ที่สุด (มีฟันทั้งหมด 42 ซี่) คู่กับเฟืองหลังอันเล็กที่สุด (มีฟันทั้งหมด 11 ซี่) ดังนั้นค่า gear ratio = 42 / 11 = 3.8 ซึ่งมีค่ามากที่สุดสำหรับระบบเกียร์ของรถคันนี้ (สอดคล้องกับสมการที่ 2) ต่อมาถึงช่วงขี่ขึ้นเขา นักปั่นจะรับรู้ทันทีว่ายากมากขึ้นในการพยายามที่จะหมุนจานหน้าไปแต่ละรอบ เพราะช่วงขี่ขึ้นเนินมีแรงดึงดูดของโลกเป็นตัวถ่วงเพิ่มขึ้น (ต่างกับตอนขี่แนวราบที่แรงดึงดูดของโลกตั้งฉากกับทิศทางการเคลื่อนที่ของรถ จึงไม่ได้เป็นทั้งตัวถ่วงหรือต้วเสริม) ยิ่งชันมาก ยิ่งยากลำบาก ทำให้รอบขาตกลงไปโดยปริยาย
ลองมาประเมินดูว่านักปั่นต้องพบกับความยากลำบากอย่างไรถ้ายังคงปั่นขึ้นเขาด้วยเกียร์ 3/8 ค่า gear ratio = 3.8 มีความหมายว่าในการที่จานหน้าหมุนไป 1 รอบ ล้อหลังจะหมุนไปได้ประมาณ 4 รอบ นั่นคือถ้าล้อรถจักรยานมีเส้นผ่าศูนย์กลาง 29 นิ้ว การที่ล้อหลังหมุน 4 รอบ จะทำให้รถจักรยานเคลื่อนที่ไปได้ระยะทางประมาณ 9 เมตร ซึ่งถ้าเป็นทางขึ้นเขาก็หมายถึงว่าคนขี่ต้องทำงานหนักมากในการถีบให้จานหน้าหมุน 1 รอบเพื่อที่จะขับเคลื่อนรถให้ขึ้นเนินไปเป็นระยะทางตั้ง 9 เมตร ถ้าต้องทำอย่างนี้หลายๆรอบ หัวเข่าจะสู้ไม่ไหวแน่
ทางแก้ก็คือต้องโยกไปใช้เกียร์ต่ำลง การใช้เกียร์ต่ำลงหมายถึงการลดค่า gear ratio ลงนั่นเอง เช่นสมมุติเปลี่ยนไปใช้เกียร์ 1/1 นั่นคือใช้จานหน้าอันเล็กที่สุด (มีฟันทั้งหมด 22 ซี่) คู่กับเฟืองหลังอันใหญ่ที่สุด (มีฟันทั้งหมด 34 ซี่) ดังนั้นค่า gear ratio = 22 / 34 = 0.65 ซึ่งหมายถึงว่าในการที่จานหน้าหมุนไป 1 รอบ ล้อหลังจะหมุนเกินครึ่งรอบเพียงเล็กน้อยเท่านั้น นั่นคือสำหรับล้อรถจักรยานที่มีเส้นผ่าศูนย์กลาง 29 นิ้ว การที่ล้อหลังหมุน 2/3 รอบ จะทำให้รถจักรยานเคลื่อนที่ไปได้ระยะทางเพียง 1.5 เมตรเท่านั้น จะเห็นได้ว่าคนขี่ทำงานน้อยลงมากเพราะต้องออกแรงขับเคลื่อนรถขึ้นเนินเพียงระยะทาง 1.5 เมตรเท่านั้น (ต่อ 1 รอบของการปั่น) เรียกว่าสบายกว่ากันเยอะ
เสถียรภาพของรถจักรยาน
รถจักรยานนั้นถ้าจับให้ตั้งอยู่นิ่งๆ ปล่อยมือเมื่อไหร่ก็ล้มเมื่อนั้น นั่นคือไม่มีเสถียรภาพเอาเสียเลย แต่สามารถตั้งตรงอยู่ได้ด้วยล้อเพียงสองล้อ ถ้ามีความเร็ว มีคนพยายามศึกษาเรื่องนี้กันหลายราย แต่สรุปว่าขึ้นอยู่กับหลายองค์ประกอบรวมๆกัน
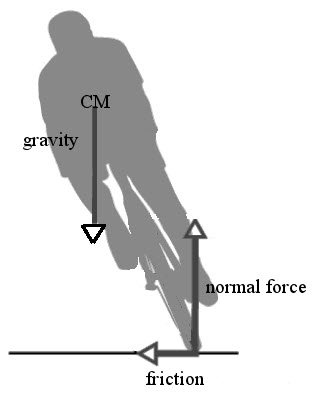
แรกนั้นแน่นอนว่าต้องขึ้นอยู่กับทักษะของคนขี่ ไม่มีใครขี่รถจักรยานเป็นมาตั้งแต่เกิด ต้องมีการฝึกฝน ต้องรู้จักเลี้ยงตัวให้จุดศูนย์ถ่วง (center of gravity) รวมของคนขี่กับรถจักรยานอยู่ในแนวดิ่งเหนือจุดสัมผัสระหว่างล้อรถกับพื้นถนน ในทำนองเดียวกับนักกายกรรมเลี้ยงตัวอยู่บนจักรยานล้อเดียว แต่ง่ายกว่า
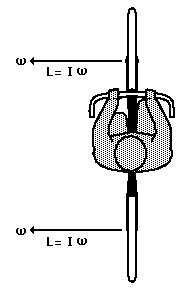
ประการต่อมาเรียกกันว่า Gyroscopic effect คือมีผลคล้ายเรื่องของลูกข่าง [ที่ตอนจะล้มเพราะแรงดึงดูดของโลก ลูกข่างที่กำลังหมุนอยู่จะไม่ได้ล้มลงตรงๆ แต่จะพยายามขัดขืนด้วยการส่าย (precess) รอบแกนดิ่งอยู่หลายรอบทีเดียว] เมื่อล้อรถจักรยานหมุนจะเกิดมีโมเมนตัมเชิงมุม (angular momentum) L ขึ้นในตำแหน่งและทิศทางดังแสดงในรูปที่ 4 คือพุ่งตรงออกมาจากจุดศูนย์กลางของล้อ แบบตั้งฉากกับระนาบของล้อ ในทิศทางเดียวกับการหมุนสกรูมือขวา โดยค่า L นี้ซึ่งเป็นปริมาณเวคเตอร์ (คือทั้งขนาดและทิศทางมีความสำคัญ) จะสัมพันธ์อยู่กับค่าโมเมนต์ความเฉื่อย I และความเร็วเชิงมุม ω ของล้อ ดังสมการต่อไปนี้
L = Iω
สมมุติรถเกิดเอียงมาทางด้านซ้ายมือของคนขี่ แต่เพื่อให้รถไม่ล้ม คนขี่ต้องหมุนแฮนด์ (handlebars) ทวนเข็มนาฬิกา (เมื่อมองจากด้านบนลงมา) การทำอย่างนี้เป็นการไปเปลี่ยนทิศทางดั้งเดิมของโมเมนตัมเชิงมุม L ของล้อหน้าให้เบนมาทางด้านหลัง แต่ในกรณีนี้การเปลี่ยนแปลงดังกล่าวถูกควบคุมอยู่โดยกฎการอนุรักษ์โมเมนตัมเชิงมุม (Conservation of Angular Momentum) ดังนั้นโมเมนตัมเชิงมุมที่เปลี่ยนไป (ΔL) จะมีทิศขนานกับพื้นถนนและชี้ไปด้านหน้าในทิศเดียวกับความเร็วรถ
โมเมนตัมเชิงมุม ΔL นี้เองที่ส่งผลให้เกิดพลังที่พยายามหมุนรถจักรยานกลับไปอยู่ในแนวดิ่ง คือพยายามต้านกับแรงดึงดูดของโลกที่พยายามจะทำให้รถล้ม นั่นคือคนที่ขี่จักรยานเป็นแล้วจะเกิดมีทักษะที่จะรู้โดยอัตโนมัติว่าถ้าจักรยานเอียงด้านไหนก็ต้องหมุนแฮนด์ไปด้านนั้นด้วย รถถึงจะไม่ล้ม ตรงจุดนี้ชี้ให้เห็นข้อเท็จจริงอีกประการหนึ่งว่าแกนแฮนด์ (handlebar stem) จะต้องหมุนได้คล่อง ถ้าฝืดเกินไปรถจะล้มได้ง่าย [ที่กล่าวมานี้บางทฤษฎีก็เสนอว่าเป็นผลมาจากแรงหนีศูนย์กลาง (centrifugal force) มากกว่า ซึ่งวิธีคิดออกจะวุ่นวายอยู่ จึงขอไม่พูดถึงในที่นี้

ประการสุดท้ายก็คือลักษณะของตะเกียบหน้า (front fork) ถ้ามีลักษณะที่เหมาะสม ถึงแม้ไม่มีคนขี่ รถจักรยานก็สามารถวิ่งไปได้ไกลพอสมควรโดยไม่ล้ม (รูปที่ 6) จากงานค้นคว้าของ Dr. David Jones [3] เสนอว่าองค์ประกอบที่มีผลต่อเสถียรภาพของรถจักรยานอีกประการก็คือค่า Trail (Δ) ดังแสดงในรูปที่ 7 ค่า Trail ก็คือระยะห่างระหว่างจุดที่ล้อสัมผัสพื้นถนน (จุด B) กับจุดที่แนวของแกนแฮนด์ (หรือแกนหมุนของล้อหน้า) สัมผัสพื้นถนน (จุด A) โดยทั่วไปจุด A จะนำหน้าจุด B ซึ่งเรียกว่ามีค่า Trail เป็นบวก ในทางตรงกันข้าม ถ้าจุด A อยู่ข้างหลังจุด B (เช่นโดยการเพิ่มระยะ fork offset ให้มีค่ามากๆ) จะเรียกว่ามีค่า Trail เป็นลบ
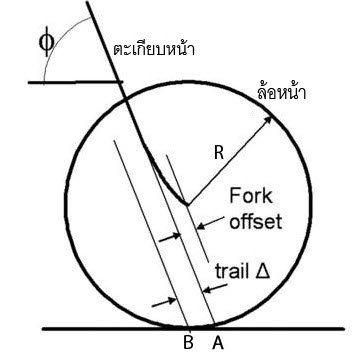
Dr. Jones ได้ทำการทดลองจริงกับรถจักรยานที่ดัดแปลงตะเกียบให้มีค่า Trail ต่างๆกัน ทั้งค่าบวกและลบ พบว่ารถจักรยานที่มีค่า Trail เป็นบวกและมีค่ามากกว่า จะมีเสถียรภาพมากกว่า ส่วนรถจักรยานที่มีค่า Trail เป็นลบจะไม่มีเสถียรภาพเลย คำอธิบายอย่างง่ายก็คือขอให้นึกถึงล้อรถเข็นในซูเปอร์มาร์เก็ต ที่เรียกว่า caster wheel ไม่ว่าตอนจอดอยู่แต่ละล้อจะหันเหคนละทิศละทางอย่างไรก็ตาม แต่พอถูกเข็นไปข้างหน้า ล้อทั้ง 4 ก็จะพร้อมใจกันเรียงตัวในแบบเดียวกันคือแบบที่มีค่า Trail เป็นบวก และจะไม่มีการหันเหออกนอกลู่นอกทางไปจากนี้ ตราบที่ยังมีการเคลื่อนที่อยู่

แต่ก็มีคำถามว่าทำไมรถจักรยานที่ใช้กันอยู่ทั่วไปจึงไม่ได้มีค่า Trail มากๆ คำตอบก็คือรถที่มีเสถียรภาพมากก็จะควบคุมยากไปด้วย เช่นการหักเลี้ยวซ้าย – ขวาจะทำได้ยาก จึงต้องประนีประนอมกันระหว่างการมีเสถียรภาพกับความคล่องตัวในการใช้งาน รถจักรยานทั่วไปมีค่า Trail ระหว่าง +2 ถึง +10 เซนติเมตร


 (163669)
(163669)  (60435)
(60435) 