

คณิตศาสตร์ใน GPS
ปัจจุบันคนจำนวนมากใช้ GPS จนเป็นสิ่งสำคัญในการดำรงชีวิตและการประกอบธุรกิจ GPS มาจากคำเต็มว่า Global Positioning System มีชื่อเต็มว่า NAVSTAR GPS จาก Navigation Satellite Timing and Ranging Global Positioning System ซึ่งเป็นเครือข่ายดาวเทียมที่ถูกส่งไปโคจรรอบโลกโดยดาวเทียมแต่ละดวงจะส่งสัญญาณวิทยุมายังเครื่องรับสัญญาณ GPS ที่อยู่บโลก หรือเหนือผิวโลก ทำให้ผู้ใช้สามารถระบุตำแหน่งของตัวเองได้ GPS เป็นระบบที่ถูกพัฒนโดยกระทรวงกลาโหมของสหรัฐอเมริกาตั้งแต่ปี ค.ศ.1978 เพื่อใช้ในกิจการทหาร ต่อมาในปี ค.ศ.1983 จึงได้เปิดให้คนทั่วไปใช้ได้โดยไม่เสียค่าใช้จ่าย ปัจจุบัน GPS สามารถดำเนินการได้อย่างเต็มระบบในปี ค.ศ.1993 ประกอบด้วยดาวเทียม 24 ดวง คนทุกคนที่มีเครื่องรับ GPS สามารถข้าถึงระบบด้ ในทุกสถานที่บ่นโลก ลอดระยะเวลา 24 ชั่วโมงและในทุกสภาพอากาศ
องค์ประกอบของ GPS
เมื่อพูดถึง GPS เรามักนึกถึงเครื่องรับ GPS แต่จริง ๆ แล้ว GPS เป็นระบบที่ประกอบด้วยสามส่วนคือ
1. ส่วนอวกาศ (Space segment)
ประกอบด้วยดาวเทียม 24 ดวง ใน 6 วงโคจร โดยแต่ละวงโคจรมีดาวเทียม 4 ดวง อยู่ที่ความสูง 20,200 กิโลเมตรดาวเทียมแต่ละดวงโคจรรอบลกในเวลา 12 ชั่วโมง ดังนั้นดาวเทียมแต่ละดวงจึงโคจรผ่านแต่ละตำแหน่งในวงโคจรวันละ 2 ครั้ง ในดาวเทียมแต่ละดวงมีนาฬิกาอะตอม (Atomic clock) ที่มีความแม่นยำสูง และจะส่งข้อมูลเกี่ยวกับตำแหน่งของตัวเองในอวกาศพร้อมทั้งเวลามายังพื้นโลก โดยใช้สัญญาณวิทยุเดินทางด้วยความเร็วแสง (299.792.458 กิโลเมตรต่อวินาที) เมื่อเครื่องรับได้รับสัญญาณที่ส่งมาจากดาวเทียม ก็จะคำนวณหาระยะทางระหว่างดาวเทียมดวงนั้นกับเครื่องรับเพื่อหาพิกัดของจุดที่ตัวรับสัญญาณตั้งอยู่
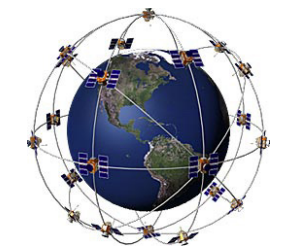
ภาพ 1 เครือข่ายวงโคจรของดาวเทียม GPS
ที่มา https://www.geek.com/geek-pick/russian-satellites-will-supercharge-your-smartphones-gps-14202371
สัญญาณจากดาวเทียมเดินทางเป็นเส้นตรงไปยังเครื่องรับ GPS และไม่สามารถทะลุผ่านดิน น้ำ กำแพงหรือสิ่งกีดขวางได้ ดังนั้น ถ้ามีภูเขาหรือตึกสูง หรือในป่าทึบเครื่องรับ GPS จะไม่สามารถรับสัญญาณได้
2. ส่วนควบคุม (Control segment)
ประกอบด้วยสถานีสังเกตการณ์ (Monitor station) 5 สถานี (แต่ได้เพิ่มเป็น 12 สถานีใน ปี ค.ศ. 2005) โดยกระจายอยู่ทั่วโลก ทำหน้าที่ตรว จสอบความสูง ตำแหน่ง ความเร็วและสถานภาพอื่น ๆ ของดาวเทียมที่โคจรอยู่ ฐานทัพอากาศฟอลคอน (Falcon Air Force Base) ในโคโลราโดสปริง มลรัฐโคโลราโด ประเทศสหรัฐอเมริกา เป็นสถานีควบคุมหลัก (Master Control Station) มีหน้าที่ปรับแก้ข้อมูลเกี่ยวกับวงโคจรของดาวเทียมแต่ละดวง และเวลาที่ได้รับจากสถานีสังเกตการณ์อื่น ๆ ให้เป็นปัจจุบันตลอดเวลา แล้วส่งข้อมูลเหล่านี้กลับไปที่ดาวเทียมก่อนที่ดาวเทียมจะส่งคลื่นวิทยุที่มีข้อมูลที่ปรับแก้แล้วมายังเครื่องรับ GPS

ภาพ 2 ตำแหน่งของสถานีสังเกตการณ์และสถานีควบคุม
ที่มา http://www.mobilecomms-technology.com/projects/gps-satellte-navigation/images/img1.jpg
3. ส่วนผู้ใช้ (User segment) มีเครื่องรับ GPS
เหมือนที่ติดตั้งในรถยนต์ เรือเดินสมุทร บนเครื่องบินหรือในโทรศัพท์มือถือ เครื่องรับ GPS จะใช้สัญญาณรหัสที่ส่งมาจากดาวเทียม 3 ดวงในการคำนวณหาระยะทางระหว่างดาวเทียมดวงนั้นกับเครื่องรับ แล้วใช้วิธีการสามเหลี่ยมในการหาพิกัดของตัวเอง
วิธีการสามเหลี่ยม (Trilateration method)
เพื่อให้ง่ายในการเข้าใจ จะเริ่มต้นด้วยการอธิบายวิธีการสามเหลี่ยมบนระนาบในสองมิติ สมมุติต้องการจะรู้ว่าท่านอยู่ ณ ตำแหน่งใดในกรุงเทพฯ ถ้ามีคนบอกว่าท่านอยู่ห่างจากอนุสาวรีย์ชัยสมรภูมิ 9 กิโลเมตร ข้อมูลนี้ไม่สามารถช่วยอะไรได้มากนัก เพราะรู้เพียงว่าท่านอยู่ที่จุดใดจุดหนึ่งบนเส้นรอบวงของวงกลมที่มีรัศมี 9 กิโลเมตรขี้งวงกลมนั้นมีจุดศูนย์กลางอยู่ที่อนุสาวรีย์ชัยสมรภูมิดังภาพ 3.1

ภาพ 3.1
สมมุติว่ามีอีกคนบอกเพิ่มเติมว่าท่านอยู่ห่างจากนิด้า 13 กิโลเมตร นั่นแสดงว่าท่านอยู่ที่จุดใดจุดหนึ่งบนเส้นรอบวงของวงกลมที่มีรัศมี 13 กิโลเมตร และวงกลมนั้นมีจุดศูนย์กลางอยู่ที่นิด้า ข้อมูลทั้งสองนี้แสดงว่าท่านต้องอยู่ที่จุดใดจุดหนึ่งในสองจุด ซึ่งเป็นจุดตัดของวงกลมทั้งสองดังภาพ 3.2
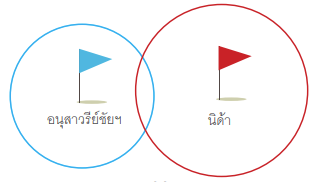
ภาพ 3.2
เนื่องจากวงกลมสองวงตัดกันที่จุดสองจุด (อาจเป็นไปได้ว่าวงกลมสองวงอาจตัดกันที่จุดเดียวในกรณีนี้ท่านจะรู้ตำแหน่งของท่านทันที) สมมุติว่าวงกลมทั้งสองนั้นตัดกันที่สองจุด แต่บังเอิญมีบุคคลที่สามบอกว่าท่านอยู่ห่างจากมหาวิทยาลัยเกษตรศาสตร์20 กิโลเมตร ทำให้ได้ข้อมูลเพิ่มเติมว่าท่านต้องอยู่บนเส้นรอบวงของวงกลมที่มีมหาวิทยาลัยเกษตรศาสตร์เป็นจุดศูนย์กลาง โดยวงกลมนั้นมีรัศมี 20 กิโลเมตร และวงกลมนี้จะผ่านจุดใดจุดหนึ่งในสองจุดที่เป็นจุดตัดของวงกลมสองวงแรก ดังภาพ 3.3

ภาพ 3.3
เมื่อเครื่องรับ GPS รู้ระยะทางจากดาวเทียมทั้งสามดวง เครื่องรับจะสามารถคำนวณหาตำแหน่งของตัวเองได้ ดังนี้
1) เมื่อรู้ระยะห่างระหว่างเครื่องรับกับดาวเทียมดวงที่หนึ่ง ทำให้รู้ว่าตำแหน่งของเครื่องรับอยู่ที่แห่งใดแห่งหนึ่งบนพื้นผิวของทรงกลมที่มีดาวเทียมดวงนั้นเป็นจุดศูนย์กลาง และมีรัศมีเท่ากับระยะห่างนั้น
2) เมื่อรู้ระยะห่างระหว่างเครื่องรับกับดาวเทียมดวงที่สอง ทำให้รู้ว่าตำแหน่งของเครื่องรับต้องอยู่บนทรงกลมที่มีดาวเทียมดวงที่สองเป็นจุดศูนย์กลางด้วย นั่นแสดงว่าเครื่องรับต้องอยู่ทนเส้นรอบวงของวงกลมที่เป็นรอยตัดของทรงกลมทั้งสอง ดังภาพ 4
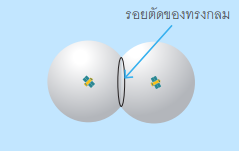
ภาพ 4 รอยตัดของทรงกลมสองรูปเป็นวงกลม
3) เมื่อรู้ระยะห่างระหว่างเครื่องรับกับดาวเทียมดวงที่สาม แสดงว่าเครื่องรับต้องอยู่บนทรงกลมที่มีดาวเทียมดวงที่สามเป็นจุดศูนย์กลางเช่นกัน ทรงกลมที่ล้อมรอบดาวเทียมดวงที่สามนี้จะตัดกับวงกลมที่เป็นรอยตัดของทรงกลมที่ล้อมรอบดาวเทียมสองดวงก่อนหน้านี้ที่สองจุด และจุดหนึ่งในสองจุดนี้จะอยู่บนผิวโลกซึ่งเป็นตำแหน่งของเครื่องรับดังภาพ 5
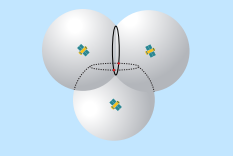
ภาพ 5 จุดสองจุดที่เป็นรอยตัดของทรงกลมที่สามกับวงกลมในรูป 4
4) จึงเห็นได้ว่า เครื่องรับ GPS ใช้ระยะทางจากดาวเทียมสามดวงในการหาตำแหน่งของตัวเอง แต่เพื่อความแม่นยำ ในทางปฏิบัตินิยมใช้ระยะทางจากดาวเทียม 4 ดวง
หาระยะทางจากดาวเทียมถึงเครื่องรับ GPS ได้อย่างไร
การหาระยะทางระหว่างเครื่องรับกับดาวเทียมแต่ละดวง ทำได้โดยหาเวลาที่สัญญาณใช้ในการเดินทางถึงเครื่องรับแล้วคูณด้วยอัตราเร็วของสัญญาณซึ่งเท่ากับอัตราเร็วของแสง เพราะสัญญาณเดินทางด้วยความเร็วแสง นั่นคือ
ระยะทาง = เวลาที่สัญญาณเดินทาง x อัตราเร็วของแสง
การหาเวลาที่สัญญาณเดินทาง ทำได้โดยหาความแตกต่างของเวลาที่สัญญาณถูกส่งจากดาวเทียมกับเวลาที่สัญญาณเดินทางถึงเครื่องรับ ปัญหาคือ เราจะรู้ได้อย่างไรว่าสัญญาณออกเดินทางเมื่อใด สัญญาณที่ส่งจากดาวเทียมเป็นรหัสดิจิตอลที่บอกเวลาและตำแหน่งของดาวเทียม เมื่อสัญญาญมาถึงเครื่องรับ เครื่องรับจะค้นหาเวลาที่สัญญาณออกจากดาวเทียม โดยดูจากรหัสที่ได้รับจริง
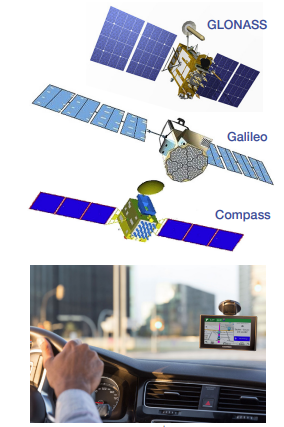
สำหรับระบบนำทางทั่วโลกด้วยดาวเทียม (Global Navigation Satellite System หรือเขียนย่อว่า GNSS) ที่ใช้ระบุตำแหน่งบนผิวโลกไม่ได้มีเฉพาะระบบ GPS เท่านั้น แต่ยังมีระบบอื่น ๆ อีก โดยแต่ละระบบจะมีจำนวนดาวเทียมที่โคจรรอบโลกแตกต่างกัน และโคจรอยู่ในระดับความสูงจากผิวโลกในระดับที่ต่างกัน ดังนี้
1. GLONASS (ย่อมาจาก GLObal NAvigation Satellite System) เป็นของรัสเซีย ประกอบด้วยดาวเทียม 24 ดวงในวงโคจรที่สูง 19,130 กิโลเมตร
2. Galileo (ซื่อเต็มคือ Galileo Positioning System) เป็นของกลุ่มสหภาพยุโรป ประกอบด้วยดาวเทียม 30 ดวง ในวงโคจรที่สูง 23,616 กิโลเมตรให้บริการการระบุตำแหน่งทั่วโลก ซึ่งควบคุมและดำเนินการโดยพลเรือน
3. Compass ปัจจุบันเรียก BeiDou-2 หรือ BDS เป็นของจีน ประกอบด้วยดาวเทียม 35 ดวง ในวงโคจรที่สูง 21,150 กิโลเมตร คาดว่าจะเป็นระบบที่สมบูรณ์ซึ่งครอบคลุมตำแหน่งต่าง ๆ ทั่วโลกในปี ค.ศ. 2020
ภาพ 6 การนำร่องด้วยเครื่อง GPS ในรถยนต์
ที่มา https://www.techavy.com/benefits-gps-device-car/
นอกจากนี้ยังมีระบบระบุตำแหน่งด้วยดาวเทียมที่ใช้ในระดับภูมิภาคซึ่งได้แก่ NAVIC ของอินเดีย DORIS ของฝรั่งเศส และ QZSS ของญี่ปุ่นเป็นต้น เป็นที่ประจักษ์แล้วว่า GPS มีประโยซน์หลากหลาย เช่น ใช้ในการนำทางการควบคุมและติดตามยานพาหนะ การติดตามตัวบุคคล การทำแผนที่ การใช้งานเพื่อการท่องเที่ยวและอื่น ๆ อีกมากมาย นอกจากนี้ จะมีการใช้ GPS ในรถยนต์ที่ไร้คนขับ ซึ่งใกล้จะเป็นความจริงในอนาคตอันใกล้นี้
บทความนี้เป็นส่วนหนึ่งของนิตยสาร สสวท. ผู้อ่านสามารถติดตามบทความที่น่าสนใจเพิ่มเติมได้ที่ https://magazine.ipst.ac.th/
บรรณานุกรม
Geospatial World (September 20, 2016). Evolution of the Global Navigation Satellite System (GNSS). Retrieved Aug. 7, 2017, from https://www.geospatialworld.net/article/global-navigation-satellite-system-gnss/.
Global Navigation Satellite System (GNSS). Retrieved Aug. 7, 2017, from https://www.princeton.edu/~alaink/Orf467F07/GNSS.pdf.
Global Positioning System History. (Oct. 27, 2012. Retrieved Aug.7.2017, from http://www.nasa.gov/directorates/heo/sca/communications/policy/GPS_History.html.
GPS (Global Positioning System). Retrieved Aug. 7. 2017, from http://www.mobilecomms-technology.com/projects/gps-satelite-navigation/gps-satellite-navigation1.html.
 (11961)
(11961)  (17099)
(17099)  (31201)
(31201) 
{kind=link}